

こんにちは.藤本・清水・藤田研究室M2の祖父江です.この記事は昨年の投稿の続き
オンラインでの研究インターンシップ経験
の内容となります.留学の経緯についてはこちらを参照下さい.
昨年10月から開始したハイブリッド形式の研究インターンシップですが,今年の5月からは現地でワクチン接種を受けたこともあり毎週フィールドテストに参加するようになりました.
基本的には月〜水でミーティングを行いバグや新しい機能などについて相談し,新しい開発ブランチを作成し,シミュレーションと木金のフィールドテストで動作の確認を行い,それが毎月のチーム全体のリリースブランチのマージされるといったフローでインターンは進みました.
DARPAチャレンジの面白いところは,「ロボコン」としての側面からは本番でスコアを稼ぐことがKPIになるものの,それを与えられたフィールド環境で実現するには既存手法を超えるものを考えて実装する必要があるという点であり,開発を続けるだけでそれが直接論文につながるということです.
Finalチャレンジが9月末であったため自分が参加した際は論文よりもとにかく開発に重点が置かれており,ロボットがどのような環境や状態にあってもfailしないようシステムを構築することが最重要でした.
8月からチームはケンタッキー州に移動して古い鉱山の洞窟を借り切り,finalチャレンジのvenueにより近い環境でテストを行いました.洞窟は広大で,最大8台のロボットが同時に探索を開始しても1時間程度ではとてもカバーしきれないほどでした.そういった環境ではロボットが構築する通信ネットワークも不安定になったり,環境の規模に対してアルゴリズムがスケールしなくなるといった問題も起こりました.
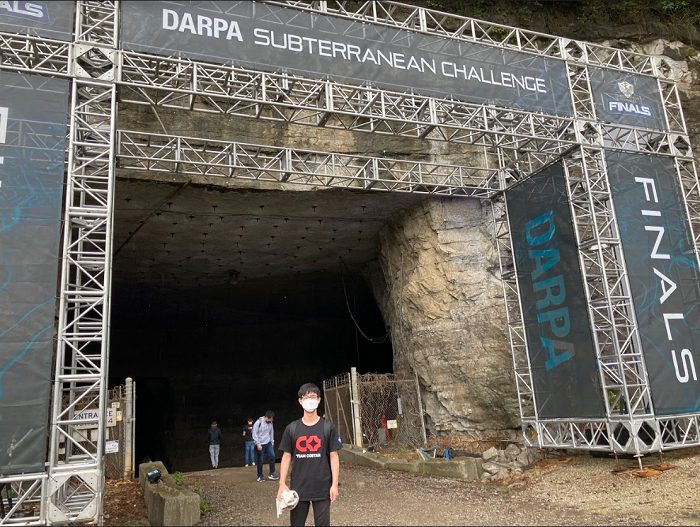
そして9月末にDARPA SubT Challengeのfinal eventが行われました.場所は同じくケンタッキー州にある古い鉱山を改造したアスレチック施設で,洞窟やurban area(古い地下鉄の駅),トンネルといった要素が組み合わさったコースがDARPAによって用意されていました.final eventの前に2回予備のeventがあり,そこではJPLのチームは良いスコアを出すことができました.しかし本番で致命的だった想定外の事態は,DARPA側がコースの入り口付近で人口の霧発生装置を動かしており,それによってコントローラーがカメラに依存している4足歩行ロボットが動かなくなったことです.それによりJPLのチームは初めの30分弱と半分のロボットを失ってしまい,結果は5位に終わってしまいました.1位を勝ち取ったのはスイスのETHのラボで,賞金として2億円が与えられました.私のインターンは9月末で終了であり,final event後はチームも休憩状態であったため,ロサンゼルスに戻った後はゆっくりと荷造りをしながら1週間過ごし,日本に帰国しました.
final eventの結果こそは満足のいかないものでしたが,ユニークで貴重な経験ができたと感じています.10月から復学しましたが,今後の研究・開発やキャリアプランに有効に活かせれば,と思います.




{kind=link}