

Hello. I’m Sobue from M2, Fujimoto, Shimizu, and Fujita Lab. This article is a continuation of last year’s post. Please see here for the details of studying abroad.
This is a hybrid research internship that started in October last year, but since May of this year, I have been vaccinated locally and have started to participate in field tests every week.
Basically, we have a meeting from Monday to Wednesday to discuss bugs and new features, create a new development branch, check the operation by simulation and field test of wood and gold, and that is the monthly release branch of the entire team. The intern proceeded with the flow of being merged.
The interesting thing about the DARPA Challenge is that, from the aspect of “Robocon”, earning a score in production is a KPI, but in order to realize it in a given field environment, it is necessary to consider and implement something that exceeds existing methods. The point is that there is, and just by continuing development, it directly leads to the paper.
Since the Final Challenge was at the end of September, when I participated, the emphasis was on development rather than the dissertation, and it is most important to build a system so that the robot will not fail in any environment or state. was.
Starting in August, the team moved to Kentucky to rent out an old mining cave and test it in an environment closer to the final challenge venue. The cave is vast, and even if up to eight robots started searching at the same time, it could not be covered in about an hour. In such an environment, the communication network constructed by the robot became unstable, and the algorithm did not scale with respect to the scale of the environment.
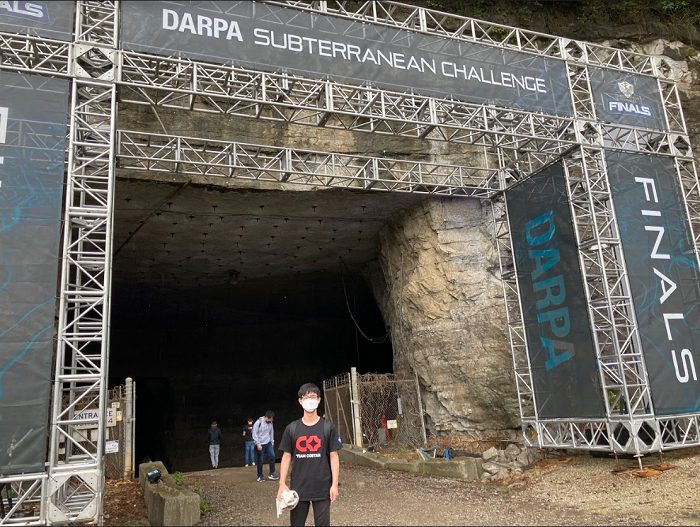
And at the end of September, the final event of DARPA SubT Challenge was held. The location is also an athletic facility remodeled from an old mine in Kentucky, where DARPA has prepared a course that combines elements such as caves, urban areas (old subway stations), and tunnels. There were two preliminary events before the final event, where the JPL team was able to get a good score. However, the unexpected situation that was fatal in production was that the DARPA side was moving the artificial fog generator near the entrance of the course, which caused the quadruped walking robot whose controller depends on the camera to stop working. .. As a result, the JPL team lost half of the robots in less than 30 minutes in the first minute, and the result ended in 5th place. The winner was the ETH lab in Switzerland, which was awarded a prize of 200 million yen. My internship ended at the end of September, and the team was in a break after the final event, so after returning to Los Angeles, I spent a week packing slowly and returned to Japan.
The result of the final event was unsatisfactory, but I feel that it was a unique and valuable experience. I returned to school in October, but I hope that it will be useful for future research and development and career planning.
This page was automatically translated into English.
Please note that the translation system may not necessarily be accurate.
Thank you in advance for your kind understanding.



{kind=link}